
En las últimas entradas vimos que el concepto de paralelismo era relativo y cómo la métrica nos podía ayudar a hacer cuentas considerando eso. Todo esto giraba en torno a una estructura matemática de 3 índices Γ a la que denominamos conexión afín, que sin embargo tenía la propiedad nada deseable de no ser un tensor (considerando como tensor los objetos tales que todos sus índices se transforman covariante o contravariantemente con transformaciones lineales). Debido a ello, si queremos crear una teoría invariante relativista resulta necesario buscar algún otro objeto que use derivadas de la métrica g y sea tensorial.
Consideraciones a priori:
La conexión afín Γ contiene de uno u otro modo todas las posibles derivadas de g, y además hemos visto que por construcción siempre tiene que existir un sistema de coordenadas en el que es nula. Por este motivo, es imposible que exista cualquier tensor que involucre primeras derivadas de g, ya que eso no es compatible con que se anule completamente en una base (las transformaciones lineales de tensores nulos siempre llevan a tensores nulos y sería nulo en cualquier sistema de coordenadas).
Consecuentemente, tendremos que ampliar el orden y recurrir a un objeto con derivadas segundas derivadas de g o productos de dos derivadas primeras.
El tensor de curvatura de Riemann:
Para obtener un objeto de dichas características, aunque nos saldrá de casualidad, podemos tomar la ley de transformación de Γ:

En primer lugar aislamos el término que incluye una derivada de la transformación lineal:

Después multiplicamos todo por la transformación de forma que se cancelen las matrices inversas:
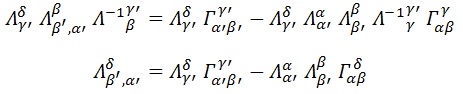
Llegados a este punto, derivamos todo parcialmente respecto a otra variable δ’ del sistema de coordenadas transformado:

Dentro de esta cuenta aparecerán 3 derivadas de transformaciones y 2 de conexiones. Para liarnos menos con los índices, primero escribimos las derivadas de las transformaciones por separado:
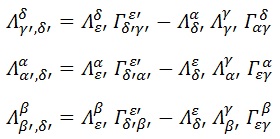
Teniendo esto, sustituimos todo en la ecuación de arriba dejando algo bastante engorroso:
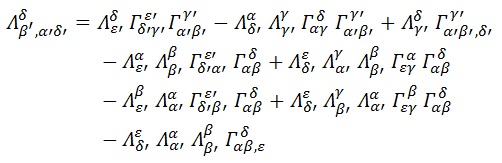
Ahora, teniendo en cuenta que podemos renombrar los índices contraídos como nos de la gana, podemos reescribir el resultado del siguiente modo:
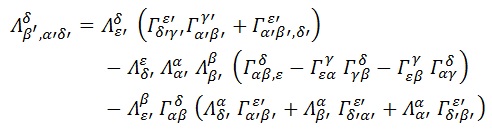
Y ya tenemos una expresión más o menos razonable para la derivada segunda de una transformación en función de ella misma y las conexiones afines.
Para proseguir, escribimos la misma ecuación intercambiando α’ y δ’:
Y ahora a la primera versión de la ecuación le restamos la segunda, viendo que todos los términos de las 3ªs líneas se cancelan y algunos de la 2ª. Además, como las derivadas parciales son intercambiables, en el primer miembro nos queda un 0:

Reordenando:

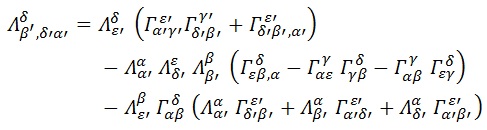
Si nos fijamos, lo que hay en paréntesis en el primer miembro y en el segundo tienen cualitativamente la misma forma, con la discrepancia de que uno tiene índices en el sistema de coordenadas transformado y el otro en el original. Por este motivo resulta lógico definir el objeto de 4 índices:

Que cumple, teniendo en cuentra la simetría de Γ y un signo que se cancelaría en ambos miembros:
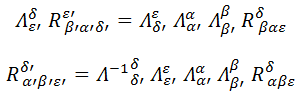
Es decir, que transforma completamente como un tensor y por tanto es el candidato a tensor de curvatura idóneo. Más concretamente, hemos llegado al Tensor de curvatura de Riemann, que cumple ser el único que se puede formar con derivadas segundas y productos de derivadas primeras de g, tal y como queríamos.
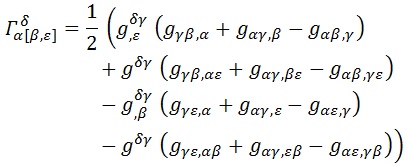
Su forma, aunque resulte un poco extraña, tiene una lógica geométrica interesante, aunque no tengo previsto comentarla en estas entradas de ahora. Baste comentar que es evidentemente antisimétrico en los índices β y ε, y que el primer término recuerda a una derivada exterior. La primera característica nos permite escribirlo indicando la antisimetrización con corchetes:

Tensor de Riemann covariante y sus propiedades:
Hemos visto hasta 2 expresiones para el tensor de curvatura en las que el primer índice estaba arriba y todos los demás abajo. Llegaremos ahora a una expresión para el caso en el que todos los índices están abajo para ver mejor sus propiedades. Recordemos que para «bajar» un índice es necesario contraerlo con una métrica covariante, y eso cuando tratamos con conexiones es tedioso.
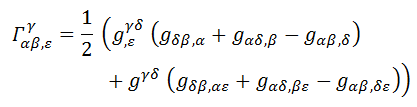
En primer lugar, recordemos la relación entre conexión y métrica:

Derivar esto nos da:
Esto es la derivada de una conexión afín, y en el tensor de Riemann teníamos la derivada exterior, que es el doble de larga:
Ahora tenemos que «bajar» el índice δ de la derivada exterior:
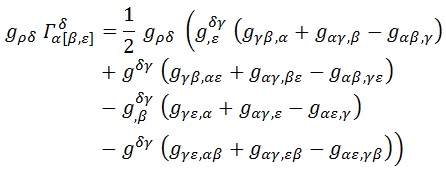
Llegados a este punto, hemos visto en la entrada anterior de elementos geométricos cómo reexpresar una derivada de la métrica covariante en función de la conexión y ella misma, pero no de una contravariante. Para cambiar la 2ª por una de las 1ªs sólo hay que tener en cuenta que la derivada de la delta de Kronecker es nula:

Esta relación implica que la derivada de una métrica contravariante contraída con una covariante es opuesta a la derivada de la covariante contraída con la contravariante. Teniendo en cuenta eso y las relaciones entre conexiones y métricas llegamos a:
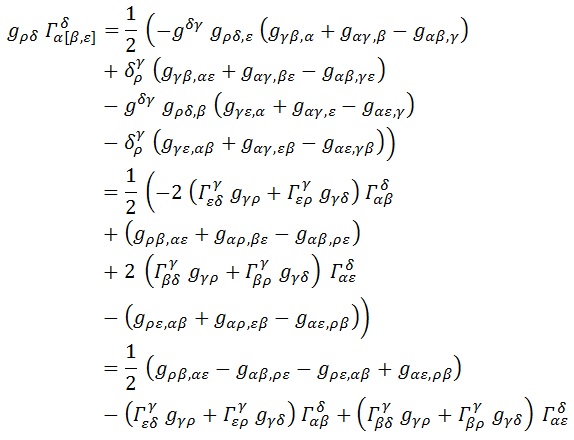
Y llegados a este punto ya prácticamente tenemos el tensor de Riemann covariante:
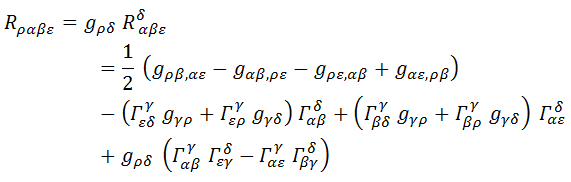
Renombrando índices contraídos y quitando los productos de conexiones repetidos se llega a:
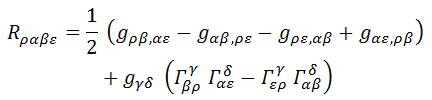
Y de esta ecuación con un poco de ojo se sacan a simple vista 2 propiedades importantes:
.-Simetría:
.-Antisimetría:

Hay otras propiedades interesantes, como la de contar el número de componentes independientes que tiene este tensor, pero igual que su motivación geométrica, serán obviadas en esta ocasión.
Contracciones del tensor de Riemann:
Contraer el primer índice de R con el tercero nos genera el Tensor de Ricci, que además es el único que se puede construir contrayendo índices, ya que las otras combinaciones de índices son antisimétricas o equivalentes y se anularían o sólo lo cambiarían de signo:

Además, contraer de nuevo los dos índices que quedan da como resultado el escalar de curvatura:

Teniendo todos estos objetos, en la próxima entrada veremos en relativo detalle la construcción del tensor de energía-momento y cómo tiene sentido relacionarlo con algunos de ellos. Es decir, en la próxima entrada veremos al fin la ecuación de Einstein de la relatividad general.
Categorías:Carrera, Física, Matemáticas, Relatividad

Hola, Adrián.
Me gusta mucho tu blog y, leyendo este artículo, me surge una duda que, seguramente, eres capaz de resolverme.
En este artículo se demuestra que el único tensor que se puede formar a partir de derivadas primeras y segundas de la métrica es el tensor de Curvatura. Para dicha demostración partimos de la ley de transformación de la conexión (que incluye derivadas de la métrica, pero no es tensorial) y llegamos al tensor de curvatura. Pues ahí está mi duda, ¿porqué partimos de la transformación de la conexión? ¿Qué razón hay para no partir de otra expresión cualquiera que involucre derivadas de la métrica? Porque podríamos haber partido de otra expresión diferente y llegar a un tensor diferente. A mí no se me ocurre otra expresión de partida diferente, pero que no se me ocurra a mi no quiere decir que no exista…
Muchas gracias de antemano
Hola, en ningún momento demuestro que el Riemann sea el único tensor posible que se puede formar. De hecho al comienzo de la sección digo «Para obtener un objeto de dichas características, aunque nos saldrá de casualidad, podemos tomar la ley de transformación de Γ». La demostración no la damos en física, y tampoco me he preocupado nunca de buscarla porque lo que interesa a fin de cuentas es que esto sea un tensor. ¿Que los matemáticos dicen que el único? A día de hoy me lo creo a pies juntillas.