
3. TEORÍA DE CAMPOS BIDIMENSIONAL
3.1. El gradiente
Bidimensionalidad.
Durante todo el bloque 2, dedicado a la teoría de campos unidimensional, analizamos los efectos de la energía potencial sobre sistemas físicos donde los cuerpos se podían mover en una única dimensión. En tales circunstancias, las operaciones normalmente eran sencillas.
No obstante, no vivimos en un mundo con una única dimensión espacial, y es conveniente adaptar todos los conceptos a dimensiones superiores. En el caso de las dos dimensiones, veremos que la principal diferencia es que los cuerpos podrán rotar unos alrededor de los otros produciendo órbitas, y la meta final de este bloque es comprender cómo se mueven los planetas alrededor del Sol, así como el movimiento de los electrones alrededor del núcleo atómico.
Comprender las matemáticas de las órbitas requerirá, no obstante, de la introducción de una serie de conceptos nuevos, como son la diferencia entre velocidad radial y rotacional, las aceleraciones perpendicular y tangencial, y el esquivo concepto de momento físico. A todo ello dedicaremos los primeros capítulos, y cuando lleguemos a las conclusiones nos parecerán más sencillas de lo que nos parecerían de otro modo.
Coordenadas cartesianas.

Esquema con los parámetros que pueden caracterizar un punto. El origen O, la componente horizontal x, la componente vertical y, la distancia al origen r y el ángulo con respecto a la horizontal θ
Las coordenadas cartesianas deben su nombre al célebre matemático y físico René Descartes, quien en el siglo XVII dijo que toda la geometría debía poderse describir en términos algebraicos, unificando las dos ramas de las matemáticas.
Descartes indicó que, sobre en un plano infinito, se marcaban dos rectas perpendiculares, a una la llamábamos eje x y a la otra eje y, podíamos definir un sistema de coordenadas muy intuitivo (al cual ahora llamamos sistema cartesiano). El punto donde ambas rectas se cortasen se llamaría centro u origen de coordenadas, y le corresponderían los valores x=0, y=0. Para indicar cualquier otro punto, tan solo habría que indicar cuánto nos teníamos que desplazar en la dirección de x y en la de y para llegar hasta él, cumpliéndose lo siguiente:
- El eje x representa el eje izquierda-derecha. Cuando x=0 estamos en el centro, cuando es positivo estamos a la derecha y cuando es negativo estamos a la izquierda.
- El eje y representa el eje arriba-abajo. Cuando y=0 estamos en el centro, cuando es positivo estamos arriba y cuando es negativo estamos debajo.
Teniendo esto en cuenta, podemos representar cualquier punto (r) del siguiente modo:

Y, como podemos apreciar, ya se nos ha complicado el indicar dónde está un cuerpo si lo comparamos con el caso unidimensional.
Distancia de un punto al origen.
Conociendo un punto cualquiera r, es posible calcular su distancia al origen mediante el teorema de Pitágoras. El cálculo de dicho valor se conoce como norma o módulo del vector, y se escribe del siguiente modo:

La norma de un punto tiene las siguientes propiedades:
- Si la norma de r es 0, entonces r es el origen de coordenadas. Y viceversa.
- Si r no es el origen de coordenadas, entonces la norma es estrictamente positiva.
El uso de la norma tiene varias utilidades, y Newton fue plenamente consciente de ello como veremos a continuación.
Coordenadas polares.
Al trabajar con problemas donde haya giros en torno al origen de coordenadas, resulta mucho más útil, en lugar conocer las coordenadas x e y, conocer la distancia al origen r y el ángulo girado θ con respecto al eje x. Estas dos coordenadas se relacionan con las cartesianas mediante los siguientes sistemas de ecuaciones:

Y, teniendo esto en cuenta, podemos expresar cualquier punto r como:

Expresión que nos será mucho más útil para los propósitos de este bloque.
Suma/resta y producto escalar de vectores.
Los puntos, tal y como los estamos representando, se convierten en estructuras matemáticas llamadas vectores, los cuales en el caso que nos ocupa siempre tendrán dos componentes.
Para sumar/restar dos vectores, simplemente sumamos/restamos sus componentes:

La suma y resta de vectores cumple, por supuesto, con las propiedades asociativa y conmutativa.
Multiplicar vectores, sin embargo, resulta más abstracto. Multiplicar sus componentes en general carece de interés y existen, de hecho, distintas versiones de qué significa realizar un producto de vectores. Comenzaremos en este bloque por hablar del producto escalar.
Cuando multiplicamos dos vectores escalarmente obtenemos un número (no un vector), y dicho número es la suma de los productos de sus componentes por parejas:

Gracias a expresión podemos, por ejemplo, decir que la norma de un vector es igual a la raíz cuadrada de su producto escalar consigo mismo:

Por tanto, el producto escalar consigo mismo de un vector cumple las mismas propiedades que la norma. Pero, además, existe una propiedad importantísima que comentamos inmediatamente.
Perpendicularidad.
La siguiente frase debe ser grabada con fuego en nuestra mente: «si el producto escalar de dos vectores es 0, entonces dichos vectores son perpendiculares«.
Es muy natural preguntarse, al leer esto por primera vez, ¿por qué? ¿Qué relación hay entre sumar los productos de sus componentes y analizar si son perpendiculares o no?La respuesta pedante sería recordar que esto que estamos diciendo será la definición de perpendicular, y que dado que será nuestra definición de perpendicular no tiene sentido preguntarse por qué es cierta, tanto como no lo tiene preguntarse por qué el número 1 es el 1.
No obstante, lo que haremos será demostrar que existe una relación directa entre esta definición de perpendicularidad y lo que solemos entender como tal.
Supongamos que tenemos dos vectores v y w, cada uno con una distancia al origen (v y w) y un ángulo diferente (θv y θw), y los multiplicamos escalarmente. Si realizamos la operación trabajando con coordenadas polares obtenemos lo siguiente:
Aquí en el último paso hemos aplicado el teorema del coseno de la suma, siendo el segundo ángulo negativo.
Este resultado se suele leer como «el producto escalar de dos vectores es el módulo del primero, multiplicado por el módulo del segundo, multiplicados ambos por el coseno del ángulo que hay entre ellos«. Y, dado que el coseno de 90º es 0, si multiplicamos escalarmente dos vectores separados por un ángulo de 90º, es decir, perpendiculares, su producto escalar será nulo.
Otra cuestión relevante es que, si los dos vectores son paralelos, el producto escalar es igual al producto de sus módulos, ya que el ángulo entre ellos será de 0º, y el coseno de 0º es 1.
Multiplicación de escalar por vector.
Esta operación es muy sencilla, y aquí simplemente confirmaremos que multiplicar un número por un vector es equivalente a multiplicar cada componente del vector por dicho número:

Gradiente.
Y con lo que hemos visto hasta ahora ya tenemos prácticamente todo el camino hecho para poder desarrollar la teoría de campos en dos dimensiones, pero aún falta un ingrediente fundamental: la derivada. ¿Cómo derivamos con respecto a la posición cuando tenemos dos dimensiones? Lógicamente, tiene que aparecer cierto concepto de derivada vectorial.
Las energías potenciales en dos dimensiones no dependerán tan solo de x, sino también de y. Denominaremos derivadas parciales de una función al hecho de derivarla con respecto a una de dichas coordenadas, suponiendo que la otra es constante, y las escribiremos como ∂xEp y ∂yEp. Veamos un ejemplo práctico:
Sabemos que una energía potencial tiene la forma Ep=c*e^x*y^2, donde c es una constante cualquiera. Obtén sus derivadas parciales.
Al derivar respecto a x la función queda igual porque es del tipo e^x. Sin embargo, al derivar respecto a y tenemos un dos en la potencia que baja multiplicando.

Una buena forma de comprobar que estamos derivando bien es obtener las derivadas parciales de las derivadas parciales, confirmando que ∂y∂xEp conlleva el mismo resultado que la operación ∂y∂xEp. A esto se le denomina comprobar que las derivadas cruzadas coinciden.
Comprueba con la energía potencial del ejercicio anterior que sus derivadas cruzadas coinciden.

Y ya tenemos todos los ingredientes necesarios para definir el gradiente de la energía potencial, el vector que indica la dirección en la que más aumenta.
La derivada parcial respecto a x nos indica cuánto varía la energía potencial al con respecto a x. Por otra parte, la derivada parcial con respecto a y nos indica cuánto varía con respecto a y. Si juntamos ambas derivadas en un vector, obtenemos la dirección de máxima variación, el gradiente de la energía potencial, ∇Ep:

Calcula, de forma general, el vector que marca la dirección en la que la energía potencial de la forma Ep=x*y^3+5*Cos(3*x)-3*log(4*y). Calcula después la dirección concreta en el caso de que x=1, y=4.
La derivada del logaritmo, como el resto, recordad que se pueden encontrar en la entrada sobre derivación.

Respecto al gradiente, como sucedía con la derivada normal en una dimensión, se cumple que la energía potencial tiene una posición de equilibrio (estable o inestable) si su gradiente se anula en ambas componentes.
Energías potenciales centrales.
Por último, queda mostrar qué sucede cuando la energía potencial depende únicamente de r, es decir, se trata de una energía potencial central. Todas las energías potenciales que hemos visto hasta ahora: la elástica, la gravitatoria y la electrostática, son de este tipo, y por ello conviene aprenderse de memoria el truco para obtener sus gradientes:
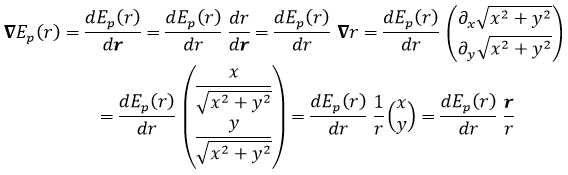
En resumen, si una energía potencial depende solo de r, su gradiente es igual a su derivada respecto a r, multiplicado por el vector r y dividido por el módulo de dicho vector. Veamos un ejemplo:
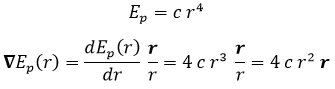
Calcula el gradiente de una energía potencial definida por Ep=c*r^4, donde c es una constante.
En el siguiente capítulo veremos cómo se reescribe todo lo que vimos para una dimensión usando vectores, y de paso introduciremos los conceptos de campo y potencial. Hasta ahora, tan solo habíamos hablado de sus conceptos gemelos de fuerza y energía potencial.
ACTIVIDADES PROPUESTAS
1. Identifica, empleando el producto escalar, cuáles de los siguientes vectores son perpendiculares entre ellos (el primer número es la componente x y el segundo la y): u=(1,2), v=(3,-4), w=(-4,2).
2. Comprueba, empleando el producto escalar, que si un vector es de la forma (A,B), el vector de la forma (C*B,-C*A) siempre será perpendicular, valga lo que valga C.
3. Obtén, de forma general, la dirección de máxima variación de la energía potencial Ep=x*y^2-x^2*y. Encuentra el punto de equilibrio.
4. Comprueba que las derivadas cruzadas de la energía potencial Ep=x^4-x*y coinciden.
5. Obtén el gradiente de la función Ep=3*raíz(r) usando el truco para energías potenciales centrales.
Categorías:Blog, Docencia, Estudiar Física de Bachillerato, Física

En, energía potenciales centrales, de donde sale el 1/r en los ultimos pasos
La raíz cuadrada es r y sale fuera del vector dividiendo.